RESEARCH
PREFACE
GNSS has been one of the most significant inventions since the last century

GNSS is ubiquitous today

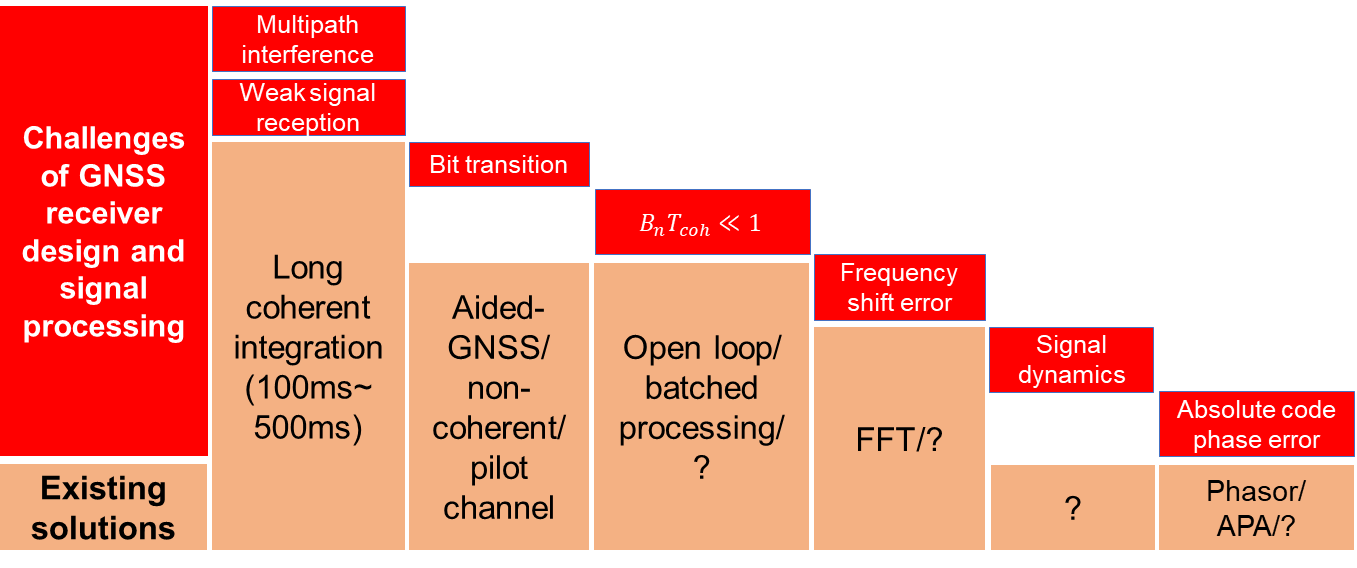
Research Problems
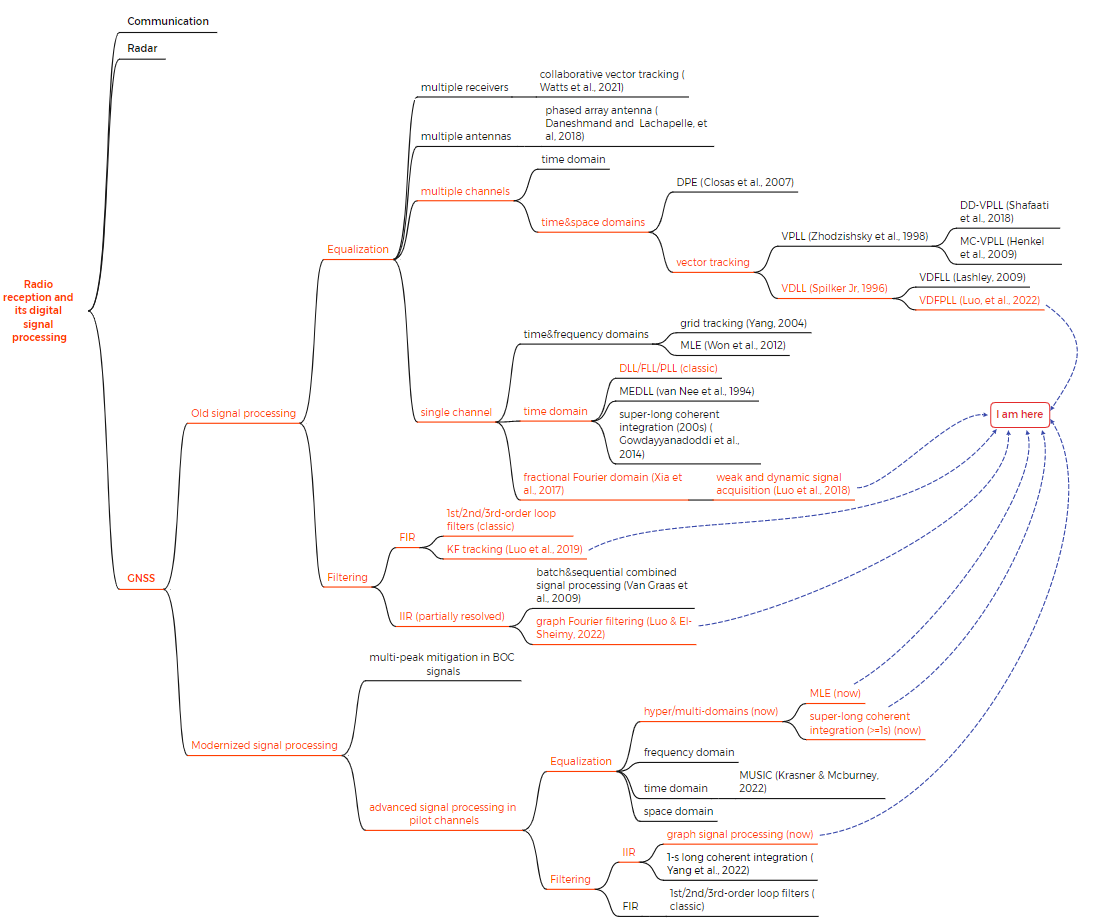
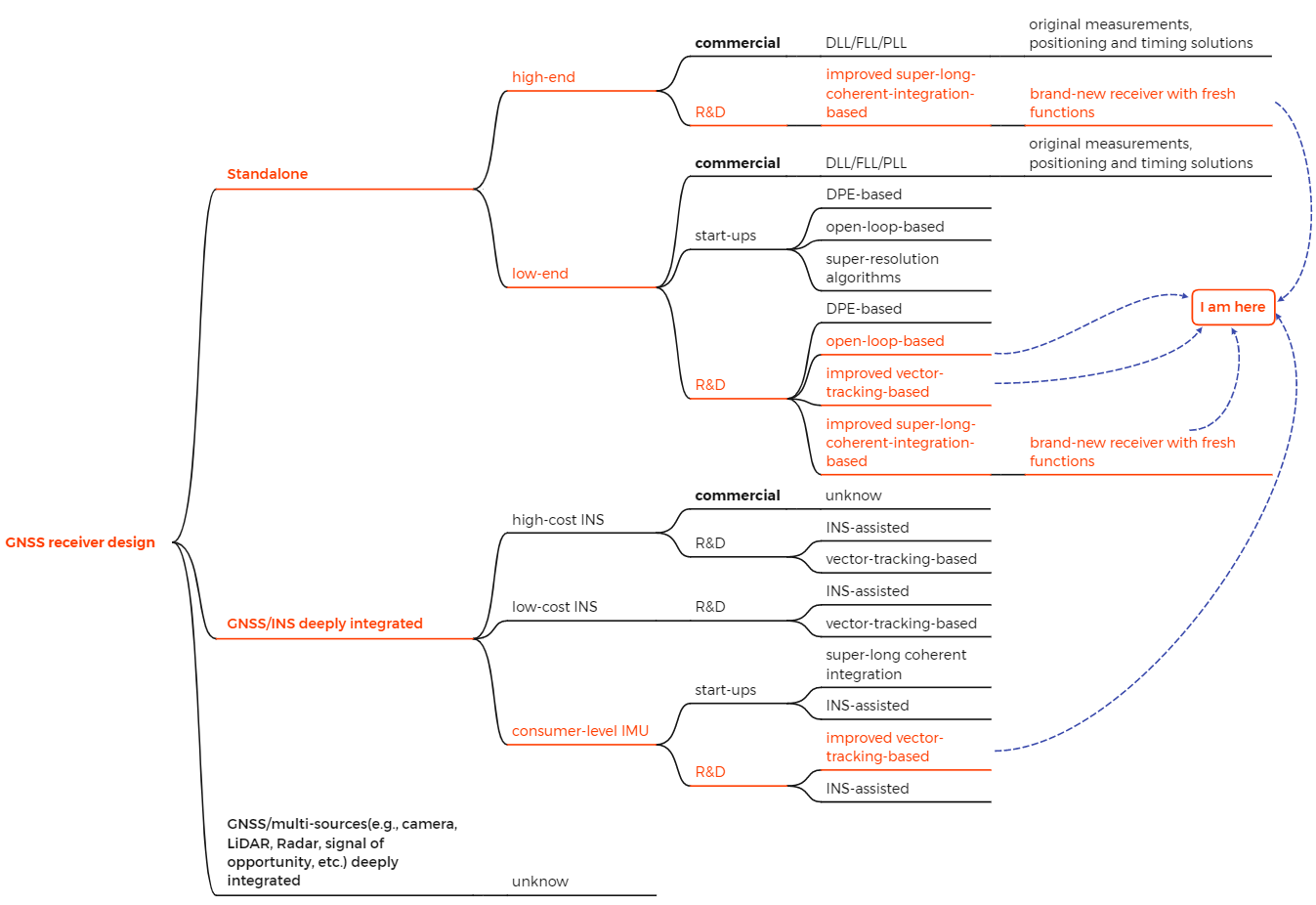
Pathway in my research
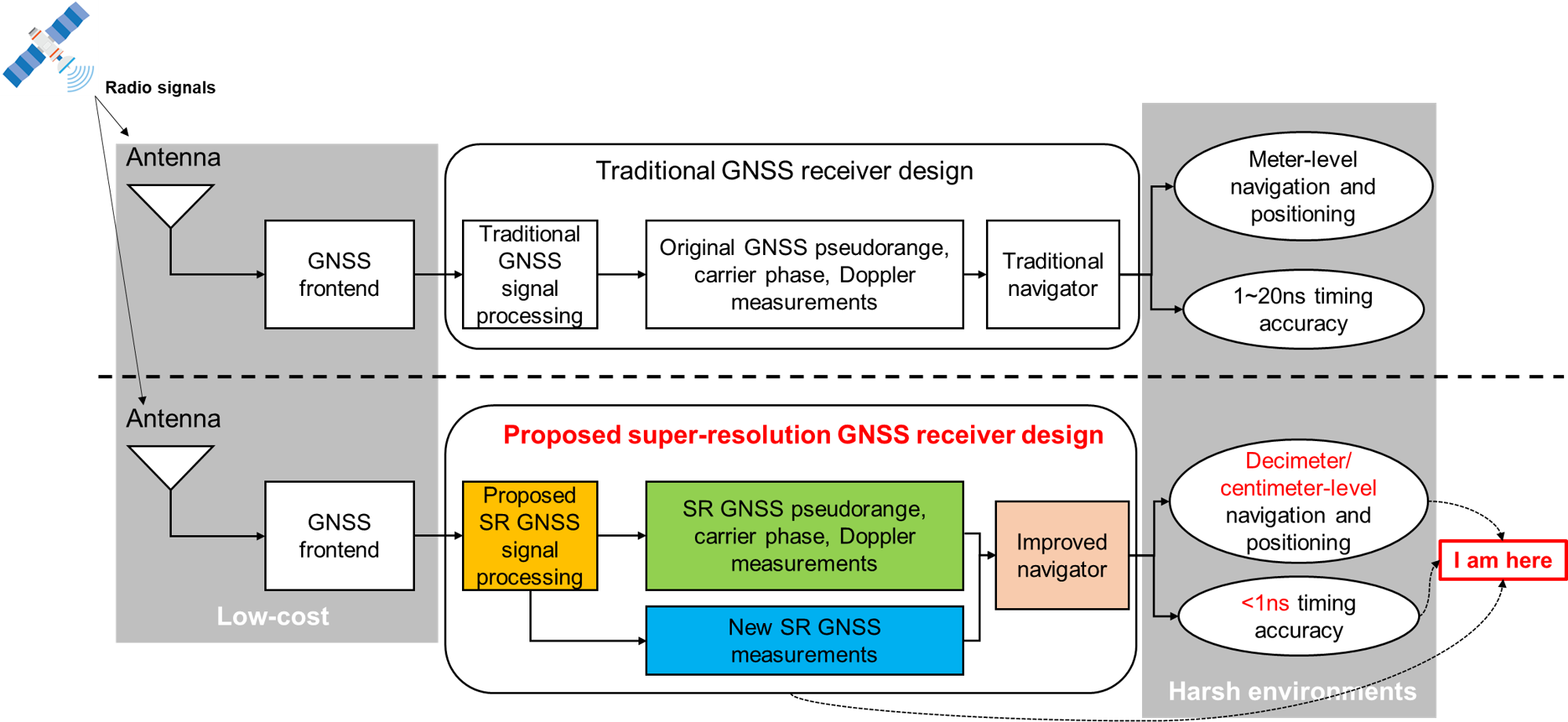
SUPER-RESOLUTION GNSS SIGNAL PROCESSING
(to be completed ...)


|
Yiran Luo, Li-Ta Hsu, Naser El-Sheimy NAVIGATION, 2023 [paper] [bibtex] A new and more advanced snapshot GNSS baseband architecture is proposed based on a closed-form complex super-long coherent integration (S-LCI) correlation (1s) in a fractional Fourier domain and a maximum likelihood estimator (MLE). It proved that the baseband estimation results achieved a theoretical lower bound (CRLB). A super-resolution (SR) snapshot GNSS receiver is practically available for future commercial markets. |

|
Yiran Luo, Naser El-Sheimy CSNC, 2022 [paper] [bibtex] We proposed a GNSS baseband graph that can be visualized within a 3D domain; then, we used GPS L5 pilot signals, an extended coherent integration technique, and graph signal processing (GSP) to de-noise the proposed graph. The real-world indoor signals have been experimented with, and the results verified the proposed algorithms efficiently improved the multipath mitigation and signal estimation accuracy. |


|
Yiran Luo (Presenter), Li-Ta Hsu, Yi Pan ION GNSS+, 2021 (Online presentation) [paper] [video] [bibtex] A LOS/NLOS GNSS signal detection method using 1-s long coherent integration is proposed in the fractional Fourier domain based on an optimal FrFT order, so that the TOA estimation can be accurately obtained regardless of the NLOS interference. |


|
Yiran Luo, Chunyang Yu, Shaohua Chen, Jian Li, Hang Ruan, Naser El-Sheimy IEEE Access, 2019 [paper] [bibtex] A highly improved analytical expression of the GNSS long-coherent-integration correlation amplitude is proposed in the fractional Fourier domain (efficient finding an optimal FrFT order), so the Doppler rate of the weak and high-dynamic GNSS signals can be fastly and precisely estimated (vastly reduced computational burden). |


|
Yiran Luo, Lei Zhang, Hang Ruan IEEE Communications Letters, 2018 [paper] [bibtex] Fractional Fourier transform is used for GNSS long coherent integration; then detection probability of weak and high-dynamic signal acquisition is significantly improved. |
ADVANCED GNSS RECEIVER DESIGN
(to be completed ...)

|
Yiran Luo, Li-Ta Hsu, Chin Lok Tsang, Naser El-Sheimy IEEE TAES (Early Access), 2023 [paper] [bibtex] We propose using an unassisted GPS L5 software-defined radio (SDR) to achieve super-resolution (SR) positioning in a highly challenging real-world scenario. Our technique takes advantage of super-long coherent integration (S-LCI) correlation (>1s) in the time-frequency domain, allowing us to obtain an SR Doppler frequency. This enables us to employ a dead reckoning approach for accurately estimating the GPS code phase, even in the presence of multipath interference caused by obstacles in urban canyons. In the near future, a new SR GNSS receiver can achieve decimeter- or centimeter-level positioning and (sub-) nanosecond timing. |


|
Yiran Luo , Li-Ta Hsu (Presenter), Naser El-Sheimy IEEE/ION PLANS, 2023 (Oral Presentation, Best Technical Paper in Track) [paper][bibtex] Based on our proposed standalone super-resolution GNSS receiver architecture, for the first time, we resolved user's absolute acceleration and clock drift rate solutions (FYI: the classic approaches including estimating a. position + clock bias, b. velocity and clock drift). We used 1-s super-long coherent integration and snapshot baseband processing, where the nuisance problems, i.e., Doppler frequency migration (DFM) and quadratic range migration (QRM), has been addressed with the digital fractional Fourier transform and keystone transform, respectively. |


|
Yiran Luo, Li-Ta Hsu, Yang Jiang, Baoyu Liu, Zhetao Zhang, Yan Xiang, Naser El-Sheimy Remote Sensing, 2023 [Paper] [bibtex] An improved deep integration method regarding low-cost INS and GNSS RTK is proposed based on the absolute-position-aided code phase tracking technique. It proves that the INS can be well-complementary for the GNSS baseband signal modeling in a challenging static scenario. |
|
|
Yiran Luo, Li-Ta Hsu, Zhetao Zhang, Naser El-Sheimy GPS Solutions, 2022 [paper] [bibtex] Float RTK solutions are deeply combined into the vector GNSS SDR baseband to directly steer local code phases based on the absolute-position-aided technique. Hardware-in-the-loop simulations and real-world static experiments verifed the performance of the proposed RTK-position-aided SDR. |
|
|
Yiran Luo (Presenter), Li-Ta Hsu, Yan Xiang, Bing Xu, Chunyang Yu ION GNSS+, 2021 (Online Presentation) [paper] [video] [bibtex] An absolute-position-aided (APA) code phase tracking is proposed to directly steer the local code phase through the NCO; then, the multipath delay error is alleviated based on a between-satellite single difference in the APA process. Static real-world experiment verified the proposed SDR performance. |


|
Yiran Luo (Presenter), Jian Li, Chunyang Yu, Jin Wang, Naser El-Sheimy MMT, 2019 (Oral Presentation, Best Student Paper) [bibtex] The vector GNSS SDR platform is enhanced with an EKF navigator and the carrier-based positioning results verified the improved SDR in a challenging kinematic real-world field test. |

|
Yiran Luo (Presenter), Jian Li, Chunyang Yu, Zhitao Lyu, Zhe Yue, Naser El-Sheimy ION Pacific PNT, 2019 (Oral Presentation) [paper] [bibtex] A GNSS SDR platform is proposed and realized based on an improved vector tracking technique, and a challenging real-world kinematic field test verified the proposed SDR. More advanced SDR techniques have been/will be proposed based on this SDR platform in our works later. |
NAVIGATION AND POSITIONING IN HARSH ENVIRONMENTS
(to be completed ...)


|
Yiran Luo (Presenter), Naser El-Sheimy ION GNSS+, 2022 (Online Presentation) [paper] [bibtex] We used the graph Fourier transform to directly de-noise the complex correlator outputs in challenging environments. As a result, within a 200-ms time window for 10-ms coherent correlation, the 3D DGPS positioning accuracy has proved to be improved by 65.3% compared to the old algorithm. |

|
Yiran Luo, Jian Li, Chunyang Yu, Bing Xu, You Li, Li-Ta Hsu, Naser El-Sheimy Remote Sensing, 2019 [paper] [bibtex] A stochastic analysis based on the Allan variance is proposed to model the clock error as a 1-st order GM process in a vector-tracking GNSS SDR. The improved model is achieved via an EKF. Real-world kinematic field tests verified that the RTK positioning accuracy of the proposed vector GNSS SDR exceeds the commercial low-cost u-Blox receiver by 21.4%. |